Finalizacija tehnika za robusno potiskivanje ambijentalne buke
Ova projektna aktivnost je počela četvrtog meseca projekta (aprila 2019) i trajala je 18 meseci, do septembra 2020. Zbog izuzetno bučnih uslova rada u realnim industrijskim postrojenjima ova aktivnost je od velikog značaja za uspeh kompletnog algoritma. Potiskivanje ambijentalne buke se vrši na dva načina. Prvi način se zasniva na premisi koja je dobro potkovana u literaturi i koja sugeriše da će u svakoj sesiji snimanja zvuk rotacionih aktuatora sa okolnim šumom biti ciklostacionaran. Samim tim bilo koji segment signala koji narušava tu stacionarnost može da se tumači kao kontaminacija i potrebno je detektovati ga i ukloniti. Kada se uklone nestacionarni segmenti zvuga dolazi se do sledeće etape, a to je potiskivanje okolnog stacionargog šuma u cilju izdvajanja akustičnog potpisa samih rotacionih aktuatora. Kombinacijom ovih pristupa kreirana je metodologija koja elimiše nestacionarne poremećaje u signalu, potiskuje ambijentalni šum i izdvaja koristan akustični potpis mašine.
Detekcija nestacionarnog šuma
Za ove potrebe koristi se statistička analiza signala i to na način da se prvo estimiraju nominalni statistički paramtri signala kada kontaminacija nije prisutna, pa se onda detektuju odstuapanja od tih parametara koji sugerišu da je do kontaminacije došlo. Kako statistička analiza signala u opštem slučaju zahteva veliku količinu informacija, osnosno prikuljenih mernih signala, u okviru ove aktivnosti su oba tima sa Univerziteta nastavili prikupljanje snimaka na terenu (TEKO i TE Pljevlja).
QQ krive su veoma efikasan statistički alat koji se koristi za poređenje očekivane i dobijene raspodele verovatnoće. Ovaj grafik se dobija skiciranjem kvantila merenog signala u odnosu na odgovarajući kvantil očekivane raspodele. Kvantili predstavljaju tačke u statističkoj raspodeli koje odgovaraju rangu sortiranih vrednosti te raspodele, a kod kontinualnih slučajnih promenljivih, kvantili su u stvari inverzija funkcije raspodele. Ako signal odgovara očekivanoj raspodeli verovatnoće, onda će se sve tačke QQ krive nalaziti na približno ravnoj liniji x=y. Primer takvog slučaja može se videti na slici ispod gde su prikazani kvantili merenog signala prikazani na y osi, a očekivani kvantili na x osi. Žuta linija predstavlja pravu x=y, a crvena linija predstavlja pravu koja najbolje opisuje mereni signal. Malo odstupanje ove dve linije govori o tome da su statistički parametri merenog signala zaista bliski očekivanim i da do kontaminacije nije došlo.

Imajući u vidu ove rezultate jasno je da statističkom analizom parametara nominalnih signala može da se detektuje trenutak kada je do kontaminacije došlo, a oblik tačaka koje opisuju QQ krivu može da se koristi ne samo za detekciju. Algoritam razvijen za detekciju nestiacionarkog šuma ima u vidu sledeću premisu: ako oblik funkcije raspodele snimljenog signala odgovara raspodeli nominalnog signala, ali su srednja vrednost i varijansa drugačiji (odnosno eksperimentalni odbirci leže na ravnoj liniji QQ krive, ali ne na pravoj x=y) ovo znači da su neke komponente zvučnog signala promenile svoj intenzitet i postoji promena u celokupnom nominalnom režimu. To može da se desi zbog promene stanja mašine koja se snima ili okolnih aparatura i takva promena ne treba da se protumači kao kontaminacija. Ako, sa druge strane, tačke na QQ krivoj ne formiraju pravu liniju, to ukazuje da je raspodela drugačija od očekivane i postoje dodatne akustičke komponente u vidu kontaminacije.
Najznačajniji korak za uspešnu detekciju kontaminacije je tačna pretpostavka o nominalnom statističkom ponašanju signala. Često se u ovakvim slučajevima pretpostavi neka konkretna raspodela (uglavnom Gausova ili Laplasova), pa se traže njeni parametri kako bi što vernije odgovarala snimljenom nominalnom signalu. Kako u našem slučaju oblik statističke raspodele signala nije poznat, kvantili će se računati eksperimentalno. Da bi se održala statistička relevantnost testa, dužina nominalnog snimka koja se koristi za analizu, mora da bude značajno veća od dužine prozora koji se testira. Obučavanje algoritma se sprovodi u tri faze. U prvoj fazi se estimira funkcija gustine verovatnoće koristeći histogramsku metodu koja je dobro utemeljena u literaturi. U drugoj fazi se određuje prvi prag za poređenje na osnovu koga će se određivati da li je došlo do bilo kakvih odstupanja u odnosu na očekivanu nominalnu raspodelu određenu u prethodnom koraku. U monitoring stadijumu algoritam jednostavno koristi podatke izračunate u toku obučavanja i na osnovu njih donosi zaključke o kontaminaciji. S obzirom da su nominalni kvantili, granice, estimacije srednje vrednosti i varijanse već određene, generisanje QQ krive u monitoring režimu je računarski lako izvodljivo i može da se obavi u realnom vremenu.
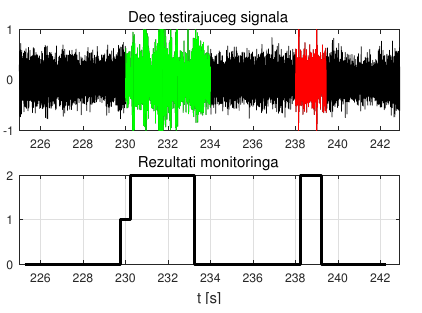
Predloženi algoritam za detekciju nestacionarnog šuma testiran je na signalima zvuka dobijenim na ventilatorskom mlinu. Sekvenca snimljenog eksperimenta je dugačka 18 minuta, a segmenti koji se analiziraju su dužine 48.000 odbiraka, odnosno trajanja 1s. Preklapanje između segmenata je 50%. U okviru eksperimenta se obezbedilo da dobijenih 18 minuta snimka sadrži dugačke sekvence nekontaminiranog signala ali i statistički relevantnu količinu kontaminacija. Postoje dve vrste kontaminacija koje su snimljene: jedna je u vidu impulsnog šuma realizovanog povremenim udarcima čekića o sam mlin i njegovu okolinu, a druga je u vidu kontaminacije govornim signalom koja je simulirana tako što je snimljeno pričanje u okolini mikrofona (slika 10). Osim ovih sadržaja, u eksperimentalnom snimku se takođe nalazi jedan segment u okviru kojeg se pomera mesto mikrofona u toku snimanja, i na taj način se simulira promena statističkih parametara nominalnog režima.
Na slici ispod je pokazano kako se algoritam ponaša na jednom izuzetno kratkom segmentu eksperimentalnog snimka. Na gornjem delu slike prikazan je deo testirajućeg signala u vremenskom domenu u kojem je obuhvaćen nominalni režim (crno), impulsni šum (crveno) i kontaminacija govorom (zeleno). Na donjem delu slike može se videti rezultat algoritma za svaki segment. Jasno je da je kontaminaciju govorom teže detektovati nego impulsni poremećaj zbog manje jačine signala govora i mogućih promena u dinamici govora.
Potiskivanje stacionarnog ambijentalnog šuma
Cilj ovog koraka je dobijanje zvučnog potpisa samog rotacionog aktuatora uz minimalni uticaj stacionarne, ambijentalne buke koja je uvek prisutna kod akustičnih snimaka načinjenih u industrijskom okruženju. Samo filtriranje je implementirano primenom DWT tehnike koja se bazira na postavljanju praga koeficijenata. Koraci su prikazani na sljedećoj slici.

Prvi korak podrazume DWT dekompoziciju snimljenog signala na način koji je opisan u prethodnom koraku. Kao rezultat dobijaju se koeficijenti. U drugom koraku se postavlja prag na koeficijente. Glavna premisa je da će koeficijenti koji pripadaju šumu biti manje amplitude i oni se eliminišu (njihova vrednost se postavlja na nulu). Sa druge strane, koeficijenti koji imaju veću vrednost se dodeljuju korisnom signalu i, u zavisnosti od odabrane metode filtriranje, ili se zadržavaju nepromenjeni (metoda tvrdog praga), ili se njihova vrednost skalira (metoda mekog praga). Nad ovako izmenjenim koeficijentima se u trećem koraku vrši inverzna DWT i dobijeni signal predstavlja pročišćenu verziju snimljenog signala.
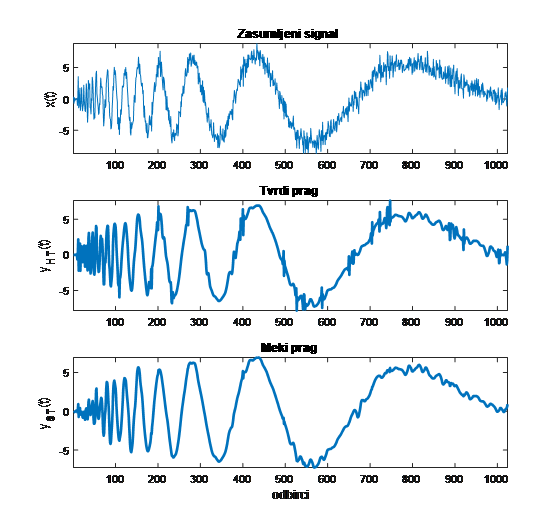
Ilustrativni prikaz efekta ovih metoda prikazan je na slici 15 gde se vidi izgled zašumljenog signala i signala dobijenog primenom mekog i tvrdog praga.
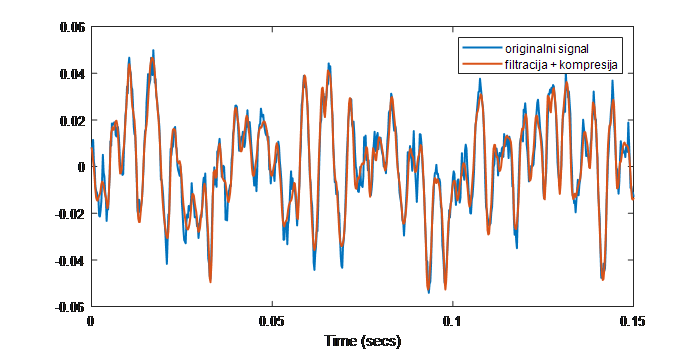
Primer ove vrste filtracije i kompresije na signalu snimljenom blizu mlina u termoelektrani dat je na slici ispod. Na slici je prikazan segment trajanja 0.15 sekundi na kome se upoređuje izgled originalnog signala i signala koji je dobijen zadržavanjem samo 10% koeficijanata DWT.